Chapter 7
보다 효율적으로 진화한 9R 스프링 드라이브의 와인딩 매커니즘

오토매틱 시계의 경우, 파워 리저브는 보다 편리한 와인딩에 있어서 실제로도 중요한 사양으로 간주됩니다. 그러나 무브먼트를 빠르고 효율적으로 와인딩 할 수 없다면 파워 리저브가 긴 시간 지속되는 것도 무의미 할 수 있습니다.
처음 만들어진 칼리버 9R이 실현되기 위해서는 그랜드 세이코만의 큰 장점인 고퀄리티의 기능성과 편리한 사용감을 갖춰야 했습니다. 이 조건에 충족하기 위해, 칼리버 9R65는 72시간의 충분한 파워 리저브를 갖추고 있었지만, 착용자의 자연스러운 움직임을 캐치하여 시계에 빠르게 전원을 공급할 수 있도록 자동 와인딩 시스템도 효율적으로 갖추고 있습니다.

1959년 스와 세이코샤(현재의 세이코 엡손 주식회사)에서 개발된 매직 레버는 시계 제작 과정에있어서 가장 잘 알려진 자동 와인딩 메커니즘 중 하나로, 효율적인 구조는 물론이고, 단순하고 비교적 적은 수의 부품 덕분에 오랜 세월을 버틸 수 있었습니다. 진동추의 방향에 관계 없이 메인스프링이 감기도록 하는 폴 레버 시스템을 사용한 이 방식은 1960년대 그랜드 세이코의 62GS와 61GS 모델을 포함한 몇몇 특정 모델에 사용되었습니다.
2004년에 만들어진 최초의 9R 스프링 드라이브 무브먼트도 매직 레버에 의존했지만 또 다른 개선 사항이 있었습니다. Caliber 9R65에서 발견된 매직 레버 버전은 이전 버전보다 착용자의 움직임에 더욱 반응성이 뛰어납니다. 21세기가 되면서 삶을 더욱 편리하게 만드는 수많은 기술과 기계들 덕분에 사람들은 5,60년대보다 비교적 팔을 덜 움직이기도 합니다. 이러한 시대적 특성을 반영해 Caliber 9R65에서는 폴 레버 암의 탄력성과 진동추가 회전할 때 이동하는 거리로 인해 성능을 향상시킬 수 있도록 처음부터 면밀하게 체크되어 만들어졌습니다.

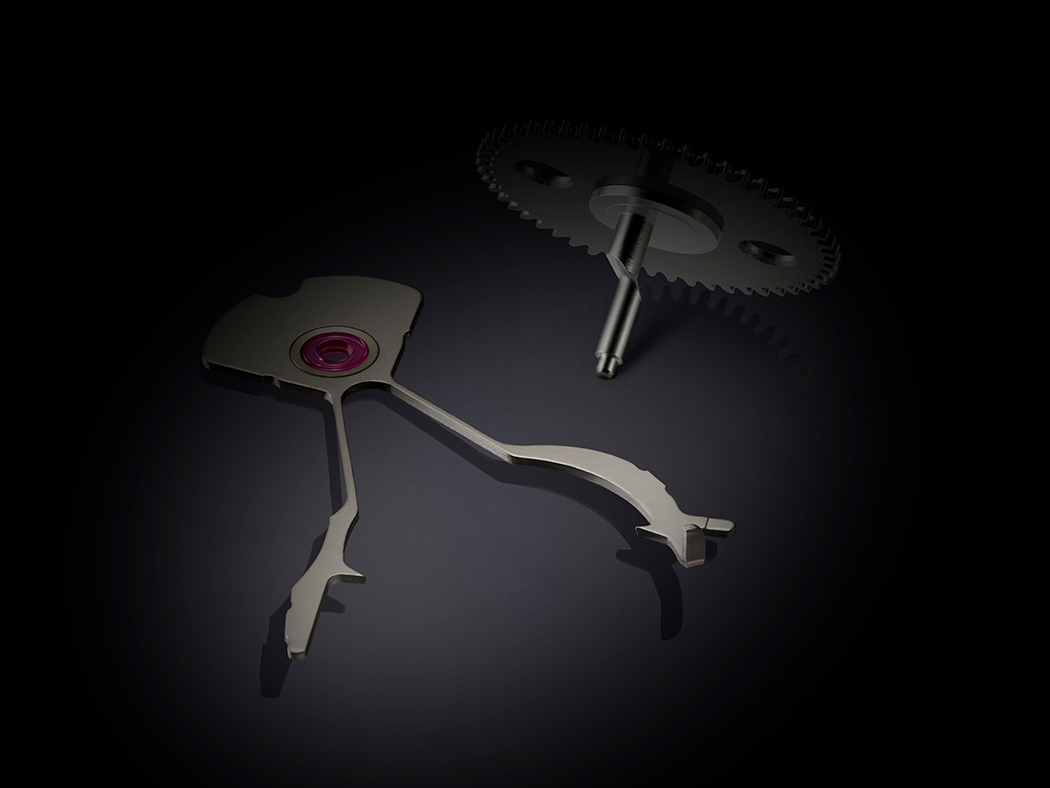
매직 레버는 자동 9R 무브먼트의 최신 버전인 9RA 시리즈에서 다시 개선되었습니다. 9RA의 경우 수많은 설계 및 성능을 고려하여 와인딩 시스템 방식을 업데이트 하는 것이 필요했습니다. 다행히도 매직 레버를 의도했던대로 추가 개조할 수 있었고, 그렇게 9RA 시리즈는 각각 와인딩을 할 수 있도록 메인스프링을 갖춘 듀얼 사이즈 배럴이 장착되었습니다. 자동 와인딩 메커니즘의 기어에 있는 이빨 모양이 개선되어 와인딩이 보다 효율적으로 향상 되었습니다.
전체적으로 더 슬림한 무브먼트를 만들기 위해서는 무브먼트의 디자인과 구성 요소를 제작하는 것에 대한 새로운 접근 방식이 필요했습니다. 크랭크 휠이 탑재된 매직 레버가 무브먼트 중심에서 약간 벗어나도록 재배치되어 겹치는 부품의 수가 줄었고 더 효율적으로 작동할 수 있게 되었 습니다. 또한 오프셋 매직 레버는 9R65보다 0.8mm 더 얇아진 5mm 두께의 캘리버 9RA2로 제작되어 3일에서 5일로 지속기간이 늘어난 파워 리저브를 제공합니다.
파워 리저브, 마감 처리, 사이즈에 대한 고민 끝에 수년에 걸쳐 9R 스프링 드라이브가 개발되었습니다. 이러한 고민 사항을 발전시키는 것은 그랜드 세이코라는 이름을 딴 무브먼트 시리즈를 고안하고 발전시키는 데 필수적이었습니다. 마찬가지로 중요한 것은 뛰어난 와인딩 효율성에 대한 탐구였으며, 이는 1959년에 만들어진 단순하면서도 독창적인 메커니즘을 발전시킴으로써 가능해졌습니다.
 Previous
Previous